Perception
Camera-lidar Calibration
This part uses Livox’s official calibration package
Note
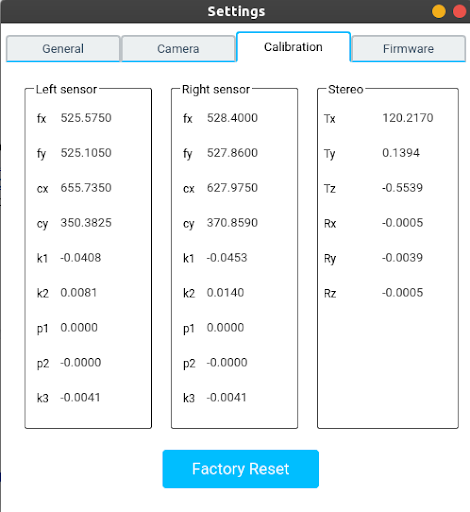
The camera has already been calibrated:
Sampling
Camera sampling
Lidar sampling
Launch the front lidar:
roslaunch livox_ros_driver livox_lidar_msg.launchRecord a ros bag for 10 seconds:
rosbag record /livox/lidar_3GGDJ1500107361